Robotics researchers have found a way for autonomous underwater vehicles to navigate strong currents with greater energy efficiency, which means the AUVs can gather data longer and better.
AUVs such as underwater gliders are valuable research tools limited primarily by their energy budget – every bit of battery power wasted via inefficient trajectories cuts into the time they can spend working.
Robotics researchers have found a way for autonomous underwater vehicles to navigate strong currents with greater energy efficiency, which means the AUVs can gather data longer and better.
AUVs such as underwater gliders are valuable research tools limited primarily by their energy budget – every bit of battery power wasted via inefficient trajectories cuts into the time they can spend working.
“Historically, a lot of oceanography data sets and sampling came from using ships, which are expensive and can only really be out for a few days at a time,” said Dylan Jones, a third-year Ph.D. student in Oregon State University’s robotics program and lead author on the study. “With autonomous underwater vehicles, you can get months-long monitoring. And a way to extend those vehicles’ missions is through smarter planning for how they get from one point of interest to another.”
Jones and Ph.D. advisor Geoff Hollinger, assistant professor of mechanical engineering in OSU’s College of Engineering, have built a framework for the vehicles to plan energy-efficient trajectories through disturbances that are strong and uncertain, like ocean currents and wind fields.
Continue reading at Oregon State University
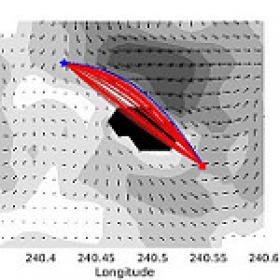
Image: Autonomous underwater vehicle paths planned by EESTO using historical ocean current data from Jan. 21, 2013. Red paths are the solutions found at the end of each iteration. The final path is represented in blue. The path starts at the blue star and ends at the red square. Credit: Oregon State University, CC BY-SA 2.0


